La NASA vuole costruire il primo sistema ferroviario lunare che fornisca il trasporto di carichi utili sulla Luna. Il sistema ferroviario autonomo potrebbe essere una parte vitale della costruzione di una base lunare sostenibile negli anni ’30.
Non è un segreto che la NASA voglia creare una base lunare come parte del suo piano Moon to Mars. L'agenzia spaziale sa anche che per poter trasportare il materiale raccolto sulla Luna sarà necessario un sistema di trasporto. Inserisci il concetto di missione Robotic Lunar Surface Operations 2 (RLSO2). RLSO2 propone di sviluppare FLOAT (Flexible Levitation on a Track) per soddisfare le esigenze di trasporto.
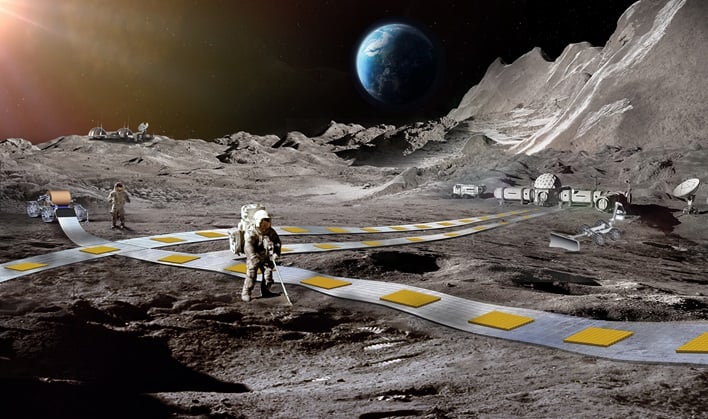
Se implementato con successo, FLOAT avrebbe il compito di trasportare la regolite estratta per i materiali di consumo ISRU (H20, LOX, LH2) o per la costruzione, nonché di trasportare carichi utili attorno alla futura base lunare e da/per zone di atterraggio o altri avamposti.

Invece di utilizzare treni tradizionali che corrono su binari, FLOAT impiegherà robot magnetici non alimentati che leviteranno su un binario di pellicola flessibile a 3 strati. Il binario comprenderà uno strato di grafite, che consentirà ai robot di fluttuare passivamente sui binari utilizzando la levitazione diamagnetica, uno strato di circuito flessibile genera spinta elettromagnetica per spingere in modo controllabile i robot lungo i binari e uno strato opzionale di pannelli solari a film sottile che genera energia per la base quando alla luce del sole. La NASA ha osservato che i robot non avranno parti mobili e leviteranno sulla pista per ridurre al minimo l'abrasione/usura della polvere lunare.
Advertisement
Un altro vantaggio derivante dall'utilizzo di questo tipo di sistema ferroviario è che si srotola direttamente sulla regolite lunare, a differenza dei metodi convenzionali che richiedono importanti lavori di costruzione in loco. Il vantaggio aggiuntivo è che può anche essere arrotolato e quindi posizionato in una posizione diversa per diverse configurazioni e adattandosi a un layout della base lunare in continua evoluzione.
Mentre RLSO2 entra nella sua seconda fase, il team si concentrerà sul completamento delle seguenti attività chiave:
Advertisement
- Progettare, produrre e testare una serie di prototipi di robot/cingoli su scala ridotta, culminando con una dimostrazione in un banco di prova analogico lunare (che include il test di varie strategie di preparazione del sito e di dispiegamento del tracciato).
- Studiare l'impatto degli effetti ambientali (ad esempio temperatura, radiazioni, carica, contaminazione del simulante della regolite lunare, ecc.) sulle prestazioni e sulla longevità del sistema.
- Esaminare/definire una tabella di marcia tecnologica per colmare le lacune tecnologiche e maturare la capacità di produzione di hardware critico (ad esempio, array magnetici di ampia area con domini magnetici su scala mm e circuiti stampati flessibili di ampia area).
- Continuare a perfezionare le simulazioni dei progetti del sistema FLOAT con maggiore fedeltà, per fornire stime delle prestazioni migliorate nell'ambito del concetto di missione RLSO2.
RLSO2 è stato un vincitore del premio NIAC Phase II del 2024 per possibili missioni future.